微型机器人的生物医用近年来引起了极大关注,尤其在传统医疗设备难以触及的狭窄管腔内精确药物递送方面表现出巨大潜力(Nelson and Pané, Science 2023, 382, 1120)。这些能够变形并根据需要进行移动的微型机器人有望改变对人体内管腔病变,如胃肠道和血液循环系统的治疗方法。由于这些机器人在人体内工作环境通常为非可视,因此,有效的定位跟踪技术对于提供关键的位置信息反馈至关重要,这有助于指导机器人的精确操作和移动。鉴于此,开发用于微型机器人定位和跟踪的新型技术已成为当前科学研究的焦点和前沿领域。这些技术的进步对于优化微型机器人在复杂人体环境中的导航和操作,以及提高治疗效率和精度具有重要意义。
在微型机器人体内跟踪领域的当前研究(O. G. Schmidt et al., ACS Nano 2020, 14, 9, 10865; W. Gao et al., Chem. Soc. Rev. 2020,49, 8088-8112; B. Wang and L. Zhang et al., Adv. Mater. 2021, 33, 2002047),涵盖了多种成像技术,如荧光成像、磁共振成像(MRI)、超声成像、放射性核素成像、光声成像,以及近期发展的激光散斑成像技术(Guan, Li and Mou et al., Sc. Adv. 2023, 9, adk7251)。上述追踪方式在处理人体内不同深度和不同器官组织中微型机器人的定位和跟踪问题方面取得了显著成果。
本研究提出的微型机器人跟踪模式基于液态金属耦合的射频识别(RFID)技术,该技术的主要优势在于其具有较高的跟踪深度(最多可达10至20厘米),并且在体内骨骼和气泡方面的干扰极小。此外,RFID技术不产生电离辐射,从而在医疗机器人领域中为微型机器人的体内追踪提供了一种安全且有效的新策略。与其他跟踪技术相比,本技术在追踪过程中不需依赖任何笨重或庞大的设备,整体系统(包括笔记本电脑)的总重量不超过3公斤。这种系统的高可携带性和低成本特点,使其在医疗条件较差的偏远地区具有潜在的应用价值。该技术不仅为微型机器人在人体内长距离驱动和精确定位提供了新方案,而且为药物精准递送提供了新思路。相关研究成果以发表在Device期刊2024年第2期,Device是Cell Press新出的器件领域旗舰期刊。论文第一作者为菠萝蜜线路一线路二1688本科生叶芷澄,通讯作者王奔老师。
论文链接:https://doi.org/10.1016/j.device.2023.100181
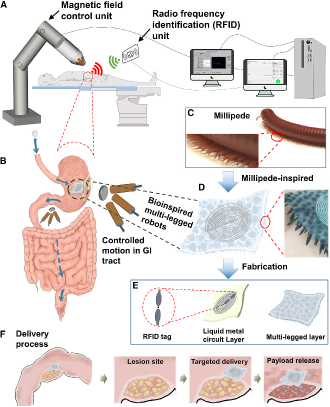
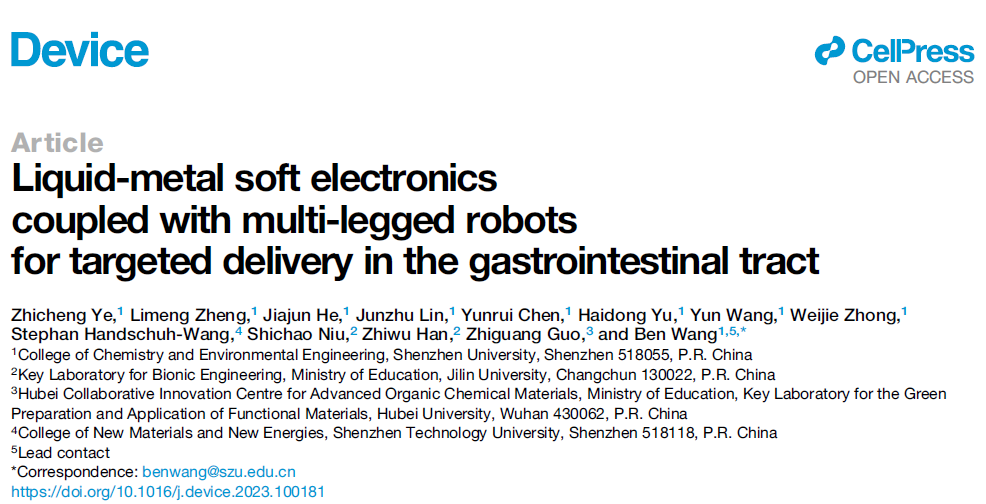
图1. 在磁性致动单元和射频识别定位系统下多足机器人的胃内递送的示意图。
软体机器人的多模态运动
在自然界中,众多陆生动物和昆虫的腿部结构使其在行进或奔跑时能够减少摩擦、增加运动自由度并有效降低能量消耗。基于对这一生物学特性的研究和模仿,科学家们开发了多软足微型机器人,这种机器人设计能够适应胃肠道等人体内复杂地形,并减少与组织表面的附着力(Shen and Wang et al., Nat. Commun. 2018, 9, 3944)。借助于精确控制的磁驱动单元,这些多足机器人能够进行形变,从而展现出多种运动模式,如沿不同轴向的卷曲、类似于潜艇的垂直浮动,以及周期性的爬行等。
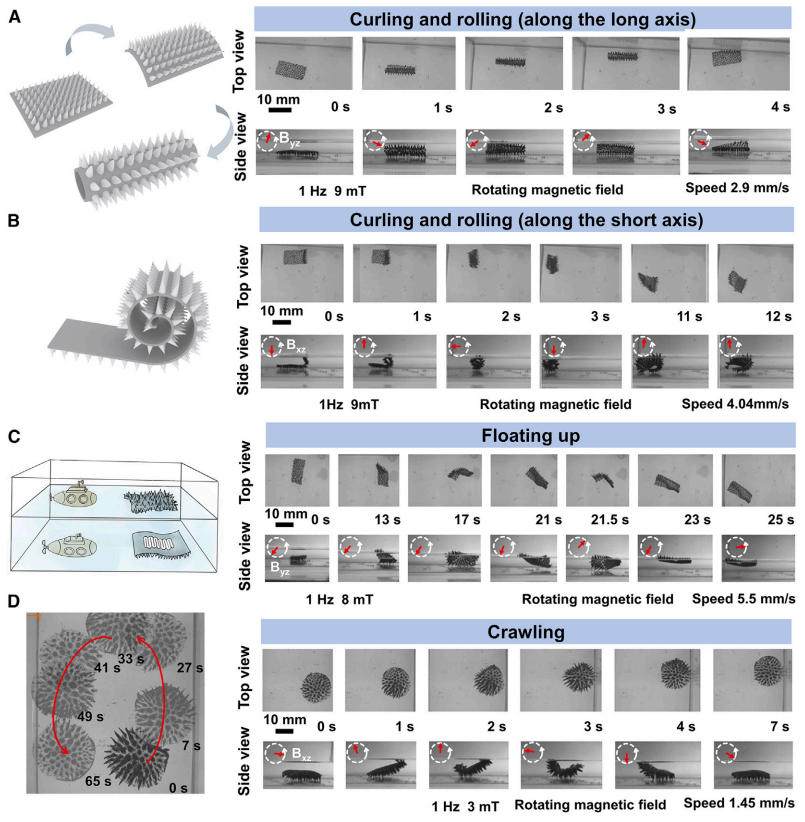
图2. 机器人的多模态运动。
RFID定位追踪
多足机器人的实时定位与传统高成本医疗成像设备的方法不同,它采用射频识别(RFID)技术进行定位。该技术通过将RFID芯片集成至机器人内部,并利用磁控装置来驱动机器人的连续移动,实现了对机器人位置的精准追踪。移动信号检测器接收来自RFID芯片的信号,从而在非直视环境中准确确定机器人的位置,并描绘出其运动轨迹。与传统的大型临床跟踪设备相比,RFID技术在体内跟踪深度方面可达10至20厘米,并且对于骨骼和体内气泡的干扰极小。更重要的是,RFID技术不产生电离辐射,从而避免了相关的健康风险。同时,该技术的应用降低了医疗成本并减少了患者接受辐射的风险。RFID技术在体内微型机器人定位和跟踪方面的应用,有望显著提高机器人在复杂生物环境中的导航和操作精度,为医学研究和治疗领域带来新的突破。这种新型跟踪方法的发展和推广将有助于提高治疗的效率和安全性。
图3. 现有主流追踪策略和液态金属耦合RFID定位设备的特征比较。
为了系统地验证液态金属耦合RFID定位装置的追踪效能,研究团队进行了一系列定量实验,这些实验考察了在不同条件下RFID检测信号的性能。具体包括:在多足机器人与RFID检测器之间不同的距离、存在不同类型障碍物情况下,以及机器人相对于检测传感器的不同法线方向和倾角下的信号响应。实验结果表明,在厘米级距离以及多种检测角度下,对多足机器人进行有效的体内跟踪是可行的。这些研究为RFID技术在复杂生物环境中的应用提供了重要的实验支持。
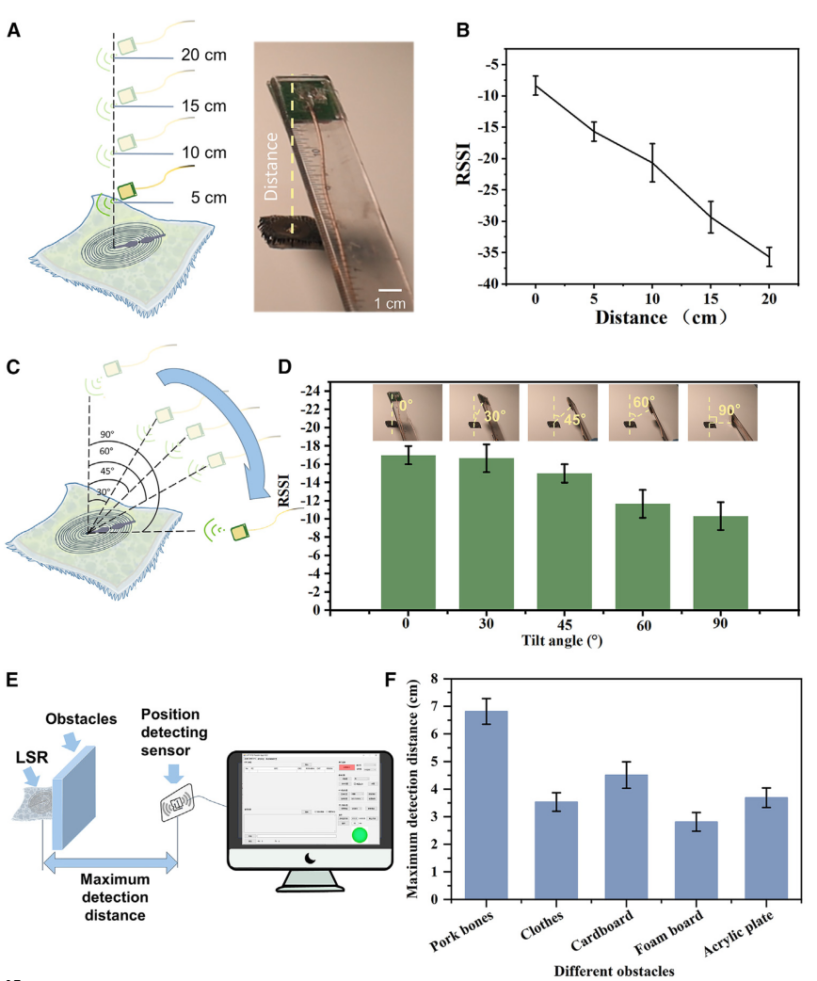
图4. 多足机器人在不同距离、不同倾角、存在障碍物等情况下的定位追踪。
软机器人在猪胃中的追踪控制
鉴于多足机器人在人体应用时需覆盖较长的操作距离,设计了一种适用于人体尺度的设备。采用大型磁控设备,可在距离离体猪胃15 cm的高度操控机器人。在这个实验装置中,当机器人在体内移动时,信号探测器接收来自RFID芯片的信号。根据信号范围,可以获得机器人的运动路径,并且与上述磁场的运动路径基本相同。此外,通过应用高频交变磁场,在胃内特定位置成功实现了多足机器人的磁热药物释放。
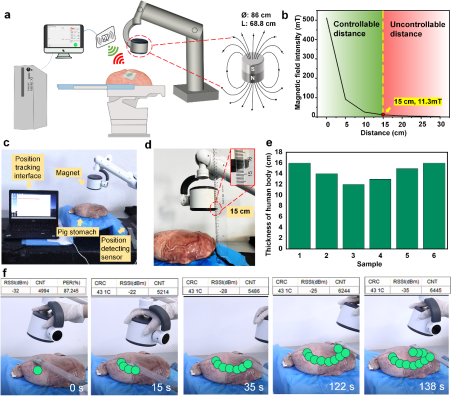
图5. 多足机器人在磁场控制下的运动和追踪。
总结
本研究报告了一种结合液态金属软电子的多足机器人,其运动和感知功能通过磁性和射频效应实现,可用于胃肠道中药物递送。在外部磁场的操控下,该机器人能够执行多种运动模式,包括卷曲翻滚、浮起潜水和爬行等,同时其位置信息可通过RFID技术进行远程读取。此外,还通过高频交变磁场成功实现了机器人搭载药物的快速磁热释放。这种具有柔性和灵活性的微型机器人在实现精准医疗和最小化侵入性治疗方面具有巨大应用潜力。



